Industrieroboter „Husky“ für die Autonomone Quartiersmobilität
Der Industrieroboter mit dem Namen „Husky“ ist Teil des interdisziplinären Forschungsprojekts
„Testfeld Intelligente Quartiersmobilität“ (TIQ). Der Begriff der „Quartiersmobilität“ bezieht sich auf die Bewegung von Menschen oder Gütern in einem Radius von weniger als drei Kilometern. Das „Quartier“ kann ein Wohngebiet, Einkaufsviertel oder eine Fußgängerzone sein, ein Schulgelände, Uni-Campus oder Park. Als selbstfahrendes Vehikel soll sich der „Husky“ mit Hilfe von Künstlicher Intelligenz in einer dynamischen Umgebung zurechtzufinden. Ganz gleich, welches der oben genannten Quartiere man wählt, geht es dabei um die Frage: Wie kann man die Mobilität zwischen Fußgängern, Rad-, Roller- und Skateboard-Fahrern oder Kleinfahrzeugen des Lieferverkehrs möglichst konfliktfrei organisieren? Zumal, wenn unter den Fußgängern auch besonders Schutzbedürftige sind, wie Menschen mit eingeschränkter Sehfähigkeit, Rollstuhl-Fahrer oder Senioren mit Rollator? Und das alles vor dem Hintergrund eines insgesamt wachsenden Verkehrsaufkommens? Was im Labor an Modellfahrzeugen erprobt wird, dient dann auch größeren Fahrzeugen wie dem Husky als Grundlage. Er soll lernen, sich autonom draußen zu bewegen – in einem zuvor definierten Straßenviertel bzw. Quartier. U.a. geht es dabei um das in der Logistik bekannte Problem der „Letzten Meile“. Anfangs wird das der Campus Berliner Tor der HAW Hamburg sein.
 and part of the TIQ project")
{kind=link}
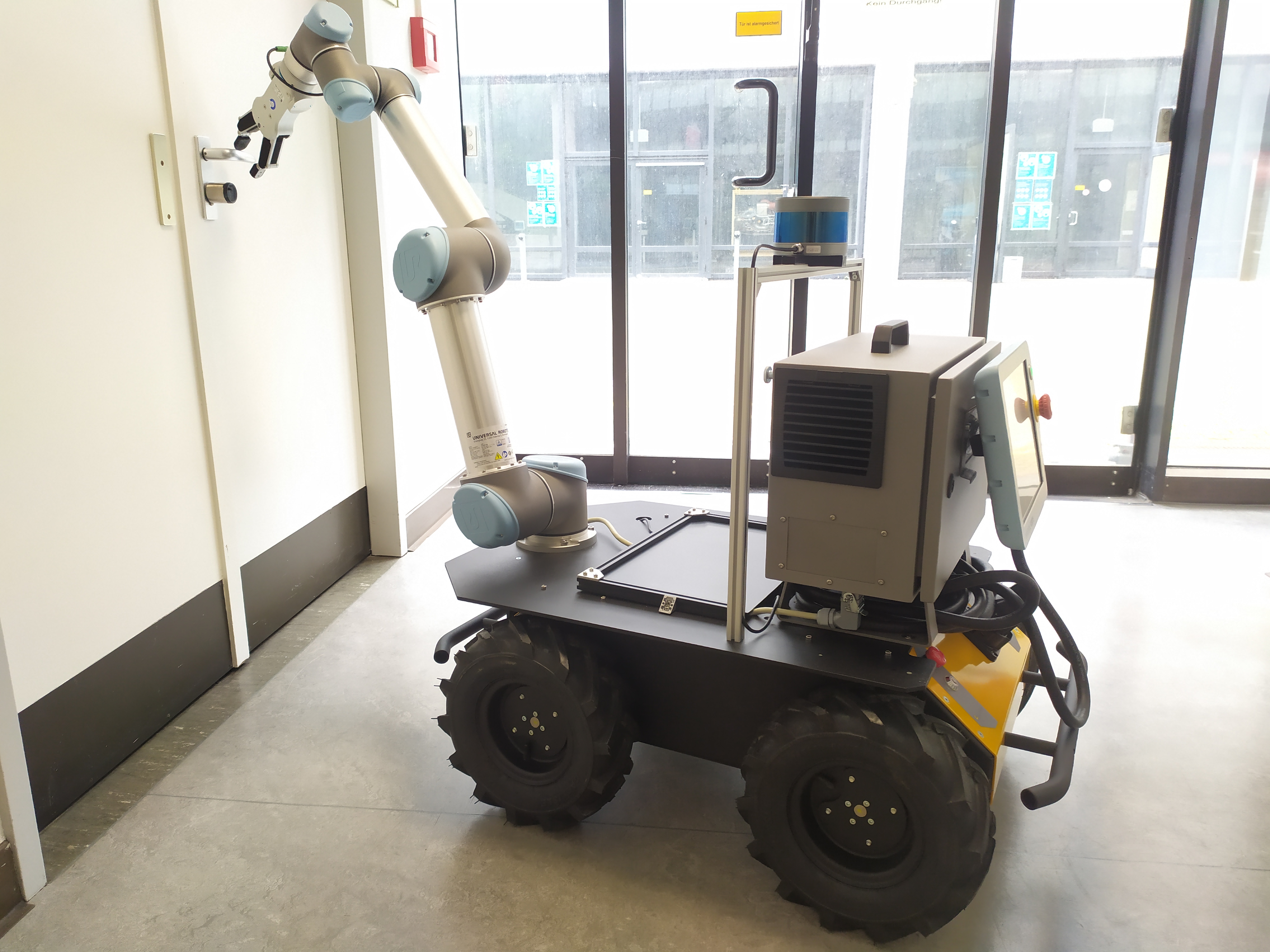
Der „Husky“ besitzt einen schwenkbaren Metall-Arm, der in eine zangenähnliche Greifvorrichtung mündet. Mit Hilfe des „Greifarms“ kann der Roboter mit seiner Umwelt interagieren und bspw. selbstständig Türen öffnen. Über einen Tablet-Rechner wird das System gestartet, der Roboter piepst, richtet seine Sensoren Richtung Tür, entfaltet den Greifarm und drückt die Klinke herunter. Dann rückt er schnell etwas vor und schiebt das Türblatt beiseite. Voraussetzung ist, dass die Tür spezielle Marker trägt, den der Roboter-Sensor erkennen kann. Als nächstes soll der Roboter Fahrstuhl fahren lernen. Das ist im Prinzip einfacher als Tür-Öffnen. Der Roboter muss „nur“ darauf programmiert werden, die Fahrstuhl- und Stockwerks-Knöpfe zu drücken.
Wichtig bei der Entwicklung einer geeigneten Software-Architektur für die komplexen Aufgaben eines autonomen Roboters ist eine gute Aufteilung in funktionale Komponenten. Eine übergeordnete Aufgabe wie ein Pakettransport wird in kleinere Teilaufgaben untergliedert. In jeder Teilaufgabe müssen komplexe Probleme gelöst werden wie die Berechnung des kürzesten Wegs. Auf dem Weg zu seinem Ziel muss der Roboter Fußgänger, Radfahrer und Baustellen erkennen und ihnen ausweichen – ohne das übergeordnete Ziel aus den Augen zu verlieren. Die Teilprobleme können in Simulationen mit Hilfe des maschinellen Lernens gelöst werden. Außerdem soll ein autonomes System Lösungen finden, wenn es an irgendeiner Stelle nicht weiterkommt. Ähnlich wie ein Wisch-Roboter. Nur erheblich komplexer.
Das Team Mikromobilität und das Department Fahrzeugtechnik und Flugzeugbau arbeiten dabei eng mit dem Team TIQ zusammen. So soll in der Zukunft eine eigene Karosserie gefertigt und ein eigenes Fahrwerk ausgelegt und entwickelt werden. Die Gruppe Mikromobilität hingegen benutzt den „Husky“ als ersten Anwendungsfall für ihre Axialflussmaschine. Derzeit werden Anwendungszenarien und Fahrprofile für den „Husky“ erstellt, um auf Grundlage dieser Randbedingungen die Parameter der zu entwickelden Maschine festzulegen.
Dieser Text ist basiert auf dem Artikel „Autonome Quartiersmobilität in der Simulation“ von Monika Rößiger. Passagen und Inhalte des Artikels wurden hier verwendet.
https://www.haw-hamburg.de/detail/news/news/show/autonome-quartiersmobilitaet-in-der-simulation/